Package website: release | dev
![]()
![]()
mlr3spatial is the package for spatial objects within the mlr3 ecosystem. The package
directly loads data from sf objects
to train any mlr3 learner. The learner can predict on various raster
formats (terra,
raster
and stars)
and writes the prediction raster to disk. mlr3spatial reads large raster
objects in chunks to avoid memory issues and predicts the chunks in
parallel. Check out mlr3spatiotempcv
for spatiotemporal resampling within mlr3.
There are sections about spatial data in the mlr3book.
The gallery features articles about spatial data in the mlr3 ecosystem.
Install the last release from CRAN:
install.packages("mlr3spatial")Install the development version from GitHub:
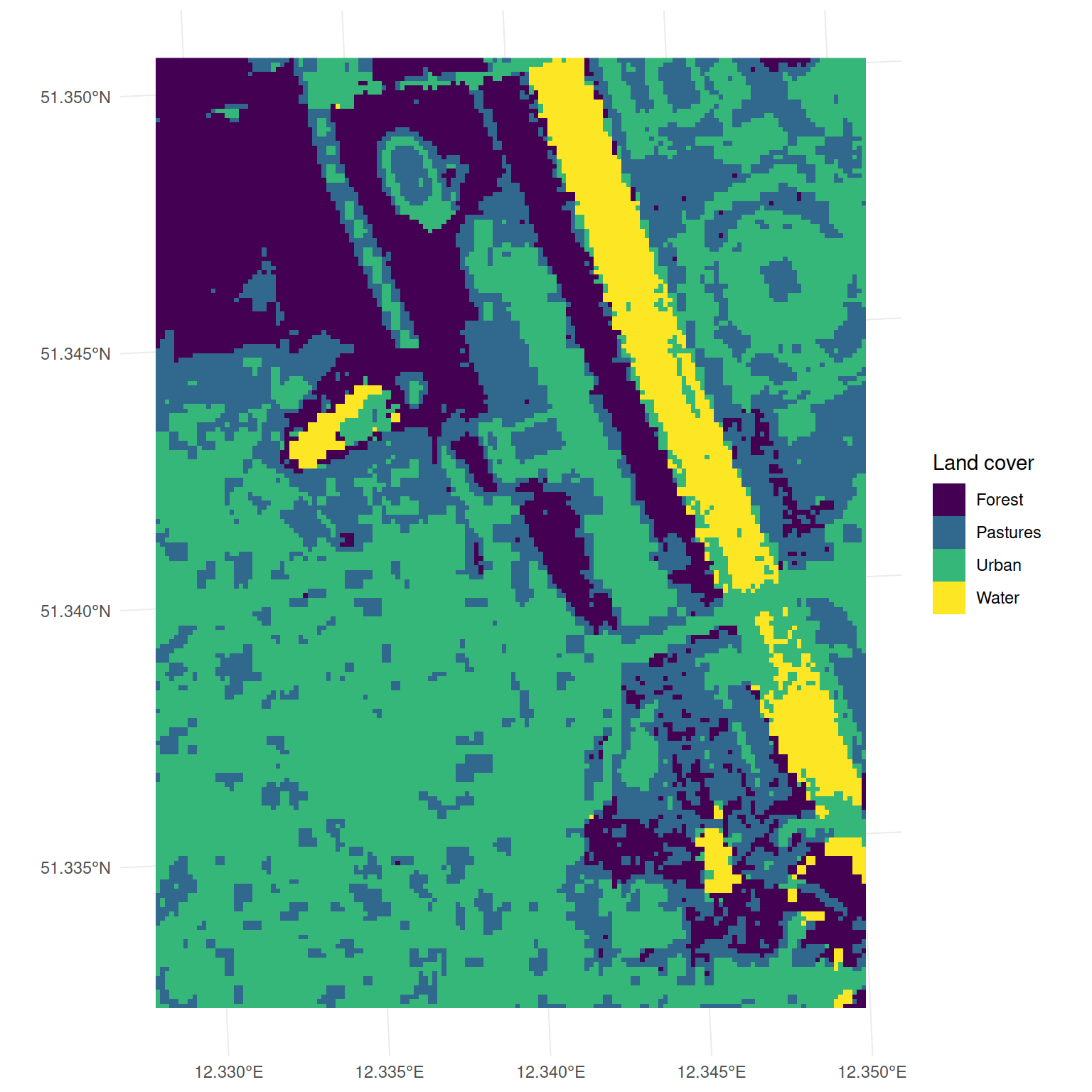
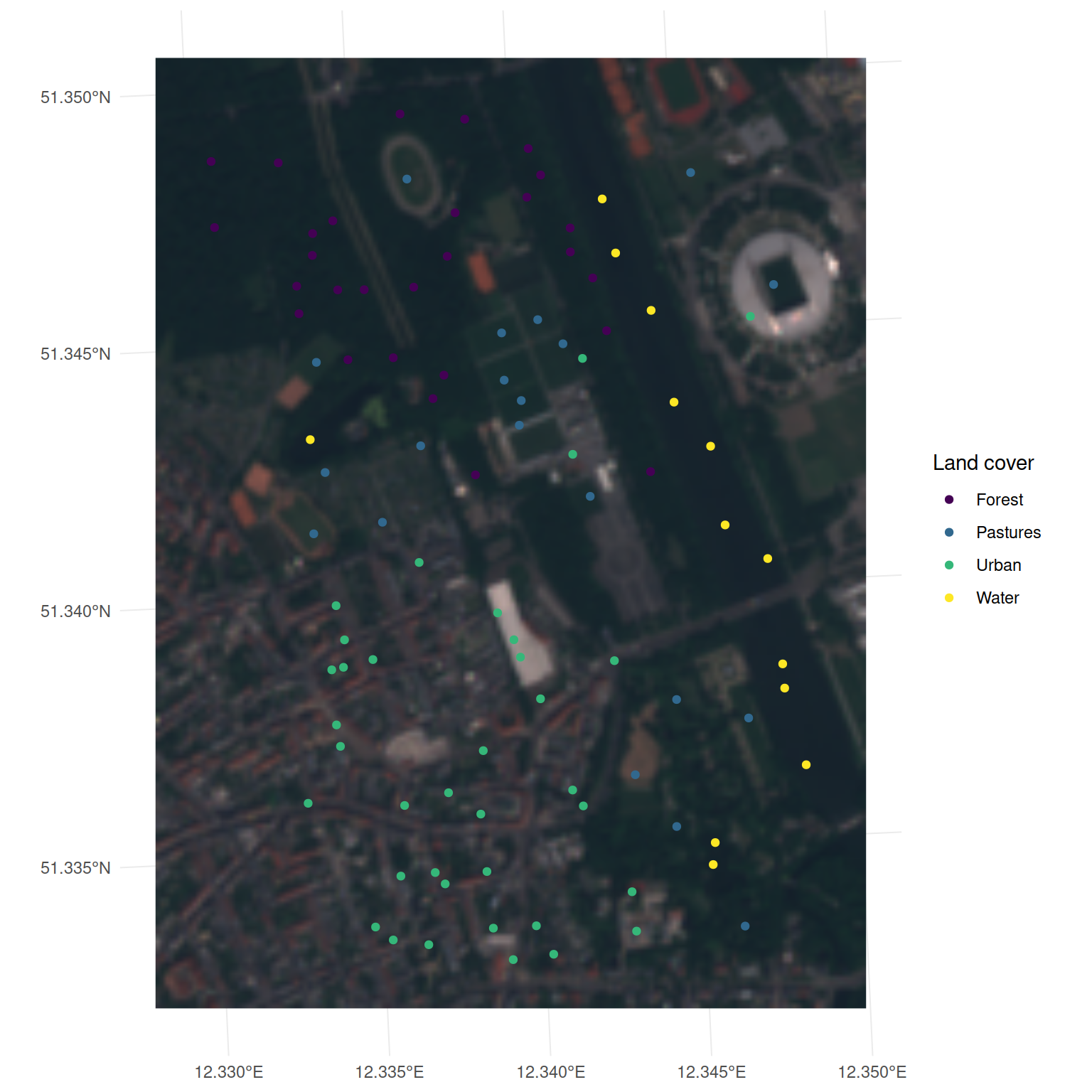
remotes::install_github("mlr-org/mlr3spatial")Our goal is to map the land cover of the city of Leipzig. The
mlr3spatial package contains a Sentinel-2 scene of the city
of Leipzig and a point vector with training sites. The Sentinel-2 scene
is a 10m resolution multispectral image with 7 bands and the NDVI. The
points represent samples of the four land cover classes: Forest,
Pastures, Urban and Water. We load the raster with the terra
package and the vector with the sf package
in the R Session.
library(mlr3verse)
library(mlr3spatial)
library(terra, exclude = "resample")
library(sf)
leipzig = read_sf(system.file("extdata", "leipzig_points.gpkg", package = "mlr3spatial"), stringsAsFactors = TRUE)
leipzig_raster = rast(system.file("extdata", "leipzig_raster.tif", package = "mlr3spatial"))The function as_task_classif_st() converts the
sf::sf object to a spatial classification task.
task = as_task_classif_st(leipzig, target = "land_cover")
task##
## ── <TaskClassifST> (97x9) ──────────────────────────────────────────────────────────────────────────
## • Target: land_cover
## • Properties: multiclass
## • Features (8):
## • dbl (8): b02, b03, b04, b06, b07, b08, b11, ndvi
## * Coordinates:
## X Y
## 1: 732480.1 5693957
## 2: 732217.4 5692769
## 3: 732737.2 5692469
## 4: 733169.3 5692777
## 5: 732202.2 5692644
## ---
## 93: 733018.7 5692342
## 94: 732551.4 5692887
## 95: 732520.4 5692589
## 96: 732542.2 5692204
## 97: 732437.8 5692300The points are located in the district of Lindenau and Zentrum-West.
Now we train a classification tree on the leipzig task.
learner = lrn("classif.rpart")
learner$train(task)As a last step, we predict the land cover class for the whole area of
interest. For this, we pass the Sentinel-2 scene and the trained learner
to the predict_spatial() function.
land_cover = predict_spatial(leipzig_raster, learner)## Warning in warn_deprecated("DataBackend$data_formats"): DataBackend$data_formats is deprecated and
## will be removed in the future.